Analoge Spannungen verstärken mit dem LM358
05.03.2025
Elektronik | Funk | Software
Der Technik-Blog

05.03.2025

25.02.2025
25.02.2025

12.02.2025
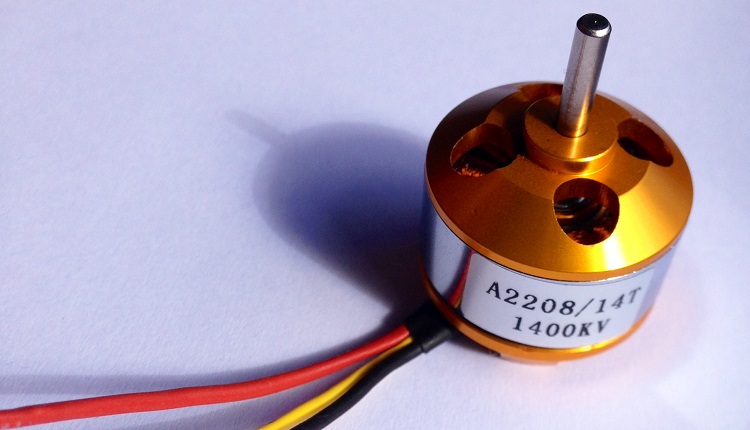
Bürstenlose Motoren (Brushless Motor) findet man hauptsächlich in der modernen Welt des Modellbaues. Aber auch in Waschmaschinen oder Elektroautos findet man eine ähnliche Variante des Motors. Der größte Vorteil ist wohl, dass diese Motoren fast verschleißfrei sind und sich extrem gut regeln lassen. Außerdem ist der Wirkungsgrad auch relativ hoch. Die Motoren sind sehr klein und haben ordentlich Leistung! Die Leistung wird in KV angegeben. 1400KV bedeutet, dass der Motor pro ein Volt Betriebsspannung 1000 Umdrehungen pro Minute hat. Bei 10 Volt wären es 14000 Umdrehungen pro Minute.
Ein einfacher Motor braucht ja nur 2 Drähte. Die Drehzahl wird hier mit der Spannung geregelt. Die Bürstenlosen Motoren haben jedoch 3 Leitungen. Stellen wir uns einen Kreis vor, dieser hat 360°. Wenn man den Kreis durch 3 teilt, erhält man 120°. Jeder einzelne Draht steuert also 120° des Motors, was bedeutet, dass 3 Leistungen den gesamten Motor steuern. Durch die unterschiedlichen Spannungen auf den 3 Leitungen fängt sich dann der Motor Drehen an. Diese Frequenzen regelt mir ein ESC.
Im Internet findet man nur sehr wenig Information, wie man den Motor mit dem Arduino oder einen anderen Controller zum Laufen bringt. Wenn man den ESC mit Spannung versorgt, muss man den ESC zuerst Kalibrieren bzw. Freischalten. Dazu muss man den ESC zuerst ein Maximum, dann das Minimum und dann das Null-Signal senden. Das genaue Signal hängt vom Motor ab, wobei es jedoch bei den meisten 2000 -> 700 -> 0 ist. Bei dem Arduino Beispiel geschieht im Programm folgendes: Zuerst wird an den PIN das höchste PWM Signal (2000) gesendet, anschließend das niedrigste PWM Signal (700) gesendet und anschließend das Null-PWM Signal (0) gesendet. Zwischen den einzelnen schritten wird jedes mal 2 Sekunden gewartet. Der Motor macht während dieser Kalibrierung einige Geräusche. Danach kann man die Serial Console öffnen und z.B. 50 eintippen. Ein 2600KV Motor fängt ab dem Wert 30 zu drehen an. Die Werte für den Motor liegen bei 0-180.
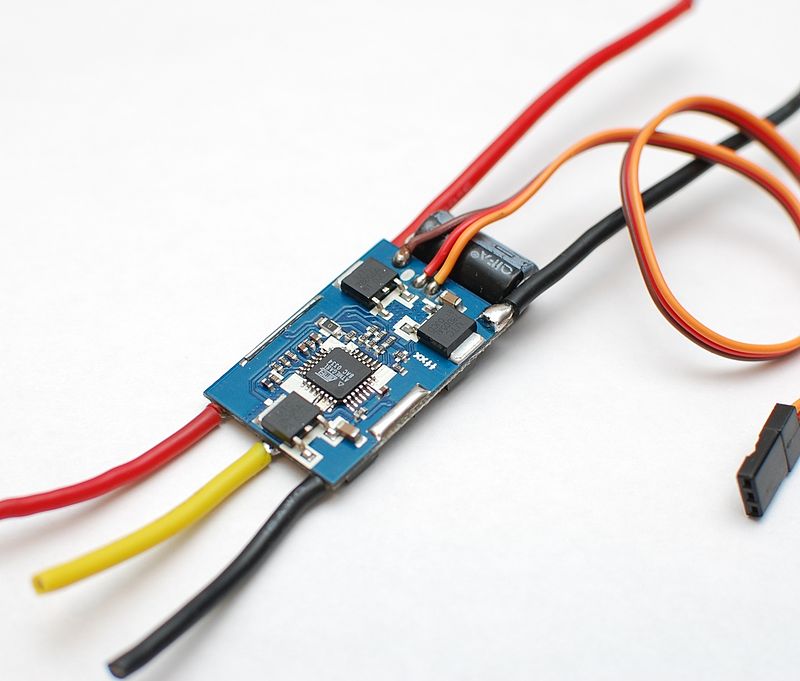
ESC bedeutet "electronic speed control" was übersetzt elektronischer Geschwindigkeitsregler bedeutet. Der ESC erzeugt die richtigen Spannungen und setzt dadurch den Motor in Bewegung. Damit der ESC weiß, wie hoch die Drehzahl sein sollte, benötigt er einen bestimmten Impuls am Eingang. Die ESC können einen sehr hohen Strom aufnehmen weshalb man auch einen entsprechenden Querschnitt an den Zuleitungen haben sollte. Auch die Spannungsquelle muss dieser hohen Belastung standhalten können. Falls der Motor in die falsche Richtung dreht, hilft es, wenn man die erste und dritte Leitung zwischen ESC und Motor vertauscht. Die mittlere Leitung (meistens Gelb) darf nicht vertauscht werden!
Falls der Motor auch mit diesem Beispiel immer noch nicht laufen will, kann es sein, dass man die Wartezeit vor der Kalibrierung vergrößern muss. Manche Motoren brauchen 10 Sekunden und noch mehr. Wenn der Motor merkwürdig langsam läuft und stark wackelt, dann liegt es meistens daran, dass der Motor keine last hat. Dazu am besten kurz mit der Hand einhalten und schon funktioniert es. Der Motor funktioniert auch dann nicht, wenn man einen normalen Pin verwendet, denn es sollte ein PWM Pin sein.

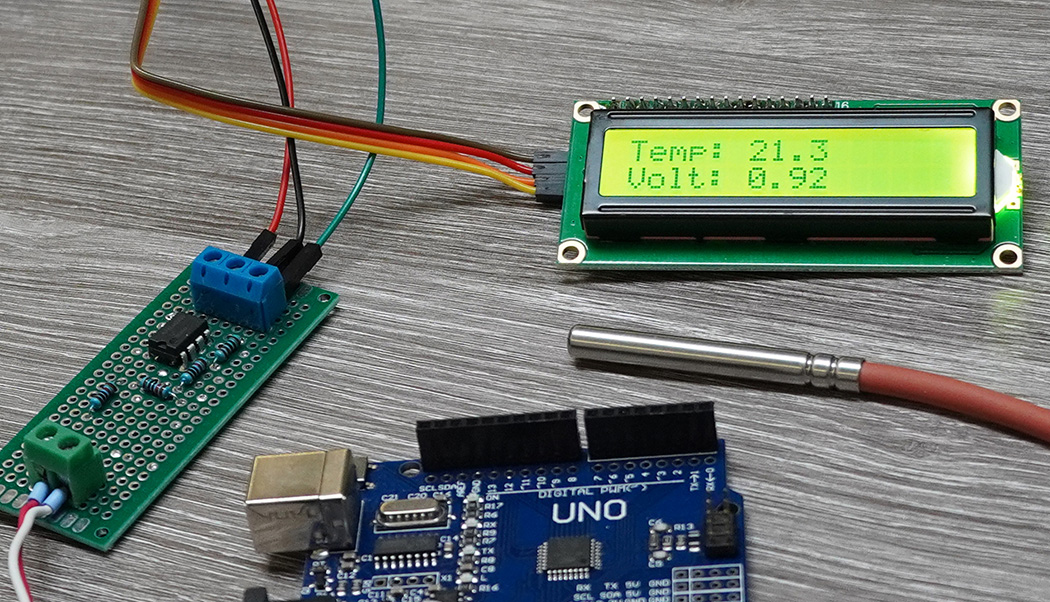
PT1000 Sensoren können nicht direkt analog mit einem Mikrocontroller gemessen werden. Wie baut man einen Messwandler mit dem LM358 für den PT1000 und Arduino?
Weiterlesen
Mit einem Mikrocontroller wie dem Arduino, einer kleinen Schaltung und entsprechender Software kann die Windgeschwindigkeit über ein Anemometer gemessen werden
Weiterlesen
05.03.2025
25.02.2025
25.02.2025
12.02.2025
AEQ-WEB ist ein Blog von Alex & Andi, der sich mit Elektronik, Funk & Software beschäftigt
WeiterlesenAEQ-WEB © 2015-2025 All Right Reserved