Analoge Spannungen verstärken mit dem LM358
05.03.2025
Elektronik | Funk | Software
Der Technik-Blog

05.03.2025

25.02.2025
25.02.2025

12.02.2025

Auf dieser Seite zeigen wir euch, wie man einen Hexacopter selber baut. Die Anleitung ist für Einsteiger gedacht, setzt aber ein Hintergrundwissen voraus. Der hier gebaute Hexacopter wird über eine 2.4 Ghz Fernsteuerung bedient. GPS ermöglicht eine automatische Rückkehrfunktion sowie das Halten einer bestimmten Position. Eine FPV Kamera überträgt ein Livebild vom Copter auf unseren Monitor. Alle benötigten Komponenten mit Bestelllinks findet man in der Materialliste. Der gesamte Hexacopter wird ca. 200 Euro kosten.

Ein Hexacopter fliegt gegenüber dem Quadrocopter viel stabiler und ist für das Filmen aus der Luft besser geeignet. Das beste am Hexacopter ist jedoch, sollte ein Motor ausfallen, kann man den Copter im Normalfall ohne Probleme landen. Ein Quadrocopter fällt dagegen wie ein Stein vom Himmel. Der Octacopter besitzt acht Propeller und ist noch ausfallsicherer. Allerdings sind hier die Baukosten erheblich teurer. Der Hexacopter hat also das beste Preis/Leistungsverhältnis und bietet eine mittlere Sicherheit.
Als Erstes sollte man sich Gedanken über den jeweiligen Hexacopter Frame (Rahmen) machen. Gute Rahmen kosten 30 – 50 Euro und sind auch in zwei bis drei Wochen von China geliefert. Wir verwenden hier einen Rahmen der Type S550. Der F550 Frame ist ziemlich baugleich. Grundsätzlich kann aber jeder beliebige Hexacopter Frame verwendet werden. Absolute Anfänger sollten sich zur Sicherheit zwei gleiche Rahmen bestellen, da man dann die Ersatzteile sofort auf Lager hat.

Hat man sich für den richtigen Frame entschieden, so macht man sich bereits Gedanken über den Flightcontroller. Der Flightcontroller ist eine kleine Platine, welche alle wichtigen Sensoren für das Balancing und die Steuerung enthält. Für Anfänger würden wir jetzt einen CC3D Controller mit LibrePilot Firmware empfehlen. LibrePilot ist der Nachfolger von OpenPilot. Allerdings unterstützt der einfache CC3D-Controller keine GPS Features oder Telemetrie Datenübertragungen. Wir greifen hier zum Naze 32 (derzeit Version 6, 10 DOF) FlightController mit Cleanflight. Der Naze unterstützt viele Features mehr, die sich die meisten Anfänger nach dem erfolgreichen Testflug sofort wünschen. Celanflight ist etwas komplizierter als LibrePilot, aber auch für Einsteiger erlernbar.
Wenn der Naze FC (Flight Controller) ganz neu in Betrieb genommen wurde, enthält er keine Firmware. Diese muss erst mit der Cleanflight Software geflasht werden. Unter Firmware im Cleanflight kann man das Board und die Firmware auswählen. Den Treiber für das Board erhält man hier. Damit der Bootloader aktiviert wird, muss man am FC zwei Lötpads Kurzschließen. Danach schließt man den FC per USB an den PC an. Jetzt kann im Cleanflight die Firmware hochgeladen werden. Nach erfolgreichen Abschluss blinken die LEDs kurz auf. Jetzt muss die Brücke wieder entfernt werden. Anschließend sollte man durch klicken auf Connect eine Verbindung zum FC herstellen können. Sollte das nicht der Fall sein, oder die Verbindung nach dem Trennen nicht wiederhergestellt werden, so hilft meistens ein Neustart des Rechners und der Software.
Zuerst werden die 6 Motoren mit dem Fixierblatt und den 4 Schrauben an der Achse angeschraubt. Im Cleanflight muss unter dem Tab Konfiguration der Drohnentyp Hexacopter ausgewählt werden. Anschließend sieht man unter dem Tab "Motors" 6 Motoren. Dabei sieht man auch eine kleine Skizze, in welche Richtung sich welcher Motor drehen muss. Es gibt drei Linkslaufende und drei Rechtslaufende Motoren. Die Motoren sind über drei Leitungen mit dem ESC verbunden. Der ESC wird anschließend am Naze Board über den 3-Poligen Stecker angeschlossen Rot und Schwarz stellt die Stromversorgung bereit, der weiße bzw. dritte Draht ist das Steuersignal (PWM). Bei der Verdrahtung ist also darauf zu achten, dass der richtige PIN am Naze den richtigen ESC & Motor steuert und der Motor auch in die richtige Richtung dreht. Es kann sein, dass der Motor verkehrt dreht, dann müssen einfach zwei Leitungen zwischen ESC und Motor vertauscht werden. Es empfiehlt sich daher, die Isolierung oder Schrumpfschleuche bei den Lötstellen zwischen ESC und Motor erst nach dem Test zu fixieren.
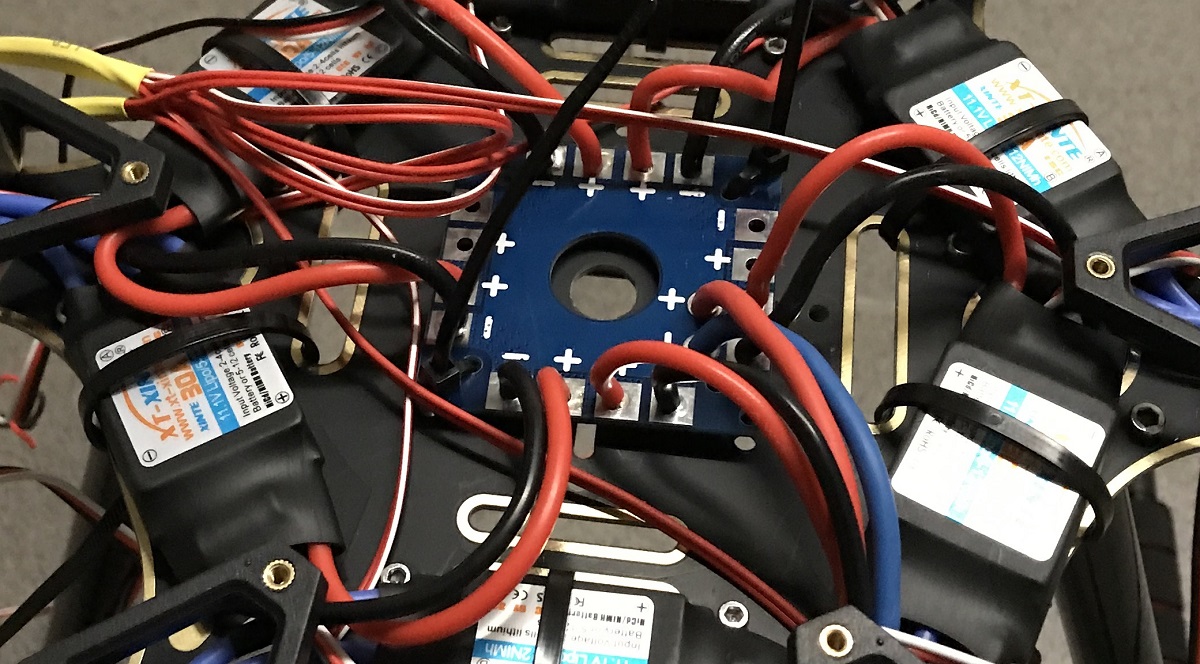
Um eine saubere und professionelle Lösung für die Stromversorgung der einzelnen ESCs zu haben, empfehlen wir die Verwendung einer Stromverteiler Platine (Power distribution board). Diese Platine hat sehr breite Kupferbahnen und haltet teilweise einen Strom von mehr als 100 Ampere aus. Für einen professionellen Copter ist diese Platine, welche ungefähr 3 bis 7 Euro kostet, ein muss. Außerdem ist diese Platine sehr sicher.

Damit die Motoren angedreht werden können, muss der ESC zuerst einmal kalibriert werden. Unsere Empfehlung ist es, die ESC einzeln zu kalibrieren. Dazu steckt man die LiPo Stromversorgung erstmal ab. Im Cleanflight beim Tab Motors wählt man den zu kalibrierenden Motor und ESC aus. Dann wird der Output des Motors auf das Maximum gestellt. Jetzt wird der ESC an die Stromversorgung angeschlossen. Der Motor piept mehrmals. Danach wird der Regler mit Cleanflight schnell herunter geschoben. Der Motor piept erneut. Jetzt die Stromversorgung vom ESC kurz wegnehmen und wieder anschließen. Es piept wieder mehrmals. Wenn der Regler jetzt langsam nach oben geschoben wird, sollte sich der Motor langsam zu drehen beginnen. Jetzt kann die Drehrichtung geprüft werden und falls erforderlich zwei Drähte zwischen Motor und ESC vertauscht werden, damit die Drehrichtung umgekehrt wird. Dieser Vorgang muss jetzt mit den restlichen fünf ESC-Motoren wiederholt werden.
Der Naze-FC unterstützt mehrere Fernsteuerungstechniken. Die bekanntesten sind PWM und PPM. Wir verwenden PPM (CPPM), da wir hier nur eine Leitung für alle 6 Kanäle brauchen und nicht so wie bei PWM für jeden Kanal eine extra Leitung. Doch wie funktioniert die Steuerung? Wenn man auf der Fernsteuerung einen Hebel betätigt, so sendet die Fernsteuerung einen wert von 1000 – 2000. Hat der Hebel die Mittelposition, so wird ein Signal von ungefähr 1500 gesendet. Der Empfänger gibt diesen Wert unverändert an den FlightController weiter. Dieser verarbeitet die Signale und steuert so die entsprechenden Motoren.
Der Receiver wird über 3 Pins mit dem Flightsontroller verbunden (5V, Ground, PPM). Beim Empfänger findet man im Lieferumfang eine Drahtbrücke. Diese wird für die Koppelung an den Sender benötigt. Die Brücke wird wie am Foto ersichtlich bei B/VCC angeschlossen. Anschließend wird die Stromversorgung hergestellt. Bei der Fernsteuerung gibt es eine Connect-Taste. Diese muss vor und während dem Einschalten gedrückt werden. Danach sind Sender und Empfänger gekoppelt.

Für die Videoübertragung wird eine FPV Kamera und ein Sender benötigt. Der Sender hat 5.8 Ghz und eine Sendeleistung von 25 mW. Es gibt auch Sendemodule mit 200 oder sogar 2000 mW. Wer eine Amateurfunklizenz hat, kann diese Module ohne Einschränkungen verwenden. Allerdings werden diese starken Module auch sehr heiß. Wer keine Amateurfunklizenz hat darf die maximale Sendeleistung von 25 mW nicht überschreiten. Das Sendemodul und die Kamera werden jeweils mit ca. 12V betrieben. Das gelbe Kabel (Videokabel) wird einfach zwischen Sender und Kamera zusammen gelötet. Anschließend wird noch laut der Anleitung vom Hersteller der Kanal eingestellt und am Monitor der Suchlauf gestartet. Ist die Suche erfolgreich, so sollte man jetzt bereits ein Livebild am Monitor sehen.
Vibrationsdämpfer müssen nicht zwingend verbaut werden. Es kann aber passieren, dass unter Verwendung günstiger Propeller eine extreme Vibration entstehen kann und so der Flightcontroller gestört wird. Als erste Lösung kommen hier Vibrationsdämpfer in Frage. Sollten die auch nicht helfen, könnte der Tausch des Flightcontrollers auch hilfreich sein. Die verschiedenen Flightcontroller haben eine unterschiedliche Empfindlichkeit sowie unterschiedliche Sensoren verbaut. Die besten Erfahrungen haben wir mit dem Naze32 gemacht.
Es gibt viele Ladegeräte die teilweise nur 10 € kosten. Diese haben keine gute Laderegelung. Wir empfehlen hier die LiPo Ladegeräte von iMax. Hier wird jede einzelne Zelle überwacht und ausgeglichen. Das Ladegerät kostet 40 bis 60 €. Bei den Akkus gibt es sehr viel Auswahl. Wir verwenden einen LiPo Akku mit 2200 mAh und 30C Entladestrom. Grundsätzlich sollte der Akku für Hexacopter mindestens 1800 mAh haben und einen dauerhaften Strom von mindestens 50 Ampere liefern. Kleine Akkus werden oft schnell heiß und können dadurch auch die Sicherheit gefährden. Grundsätzlich gilt bei LiPo Akkus immer hohe Vorsicht. Idealerweise bewahrt man diese Akkus in Explosionsfesten Behältern auf.

Bevor jetzt die Propeller installiert werden, sollte man noch einige Funktionen testen. Es ist umgehend sicherzustellen, dass alle Sensoren am Flight Controller richtig kalibriert sind. Wenn dies überprüft wurde, kann die Drohne in den "Armed" Modus versetzt werden. Achtung: Die Motoren fangen jetzt langsam an zu drehen. Mit dem "throttle" Regler jetzt langsam Gas geben. Bei der Hälfte vom Gashebel jetzt die Drohne in alle Richtungen bewegen und kontrollieren, ob die Motoren schneller und langsamer werden. Außerdem muss zuvor noch unbedingt der Flightmode aktiviert werden. Die standardmäßigen Einstellung beim Naze ist der Acro-Modus. Im Acro-Modus verliert man als Anfänger sofort die Kontrolle über den Copter. Die beste Einstellung für einen Anfänger ist der Anglemode, denn hier können keine Loopings gemacht werden und die maximale Neigung ist beschränkt.
| Material (erforderlich) | ||
|---|---|---|
| Naze32 Flight Controller | Amazon | Ebay |
| FlySky FSi6 Fernsteuerung Set | Amazon | Ebay |
| 4x 30A ESC (2x erforderlich) | Amazon | Ebay |
| 4x 1000 KV Motor (2x erforderlich) | Amazon | Ebay |
| S550 Hexacopter Frame | Amazon | Ebay |
| Power Board (Stromverteiler) | Amazon | Ebay |
| XT60 Stecker Set | Amazon | Ebay |
| Silikon Kabel | Amazon | Ebay |
| LiPo Akku 2200mAh 3S | Amazon | Ebay |
| Material (optional) | ||
| 5x 1045 Propeller | Amazon | Ebay |
| iMax B6 Ladegerät | Amazon | Ebay |
| LiPo Checker mit Alarm | Amazon | Ebay |
| Telemetrie System | Amazon | Ebay |
| FPV Video Monitor | Amazon | Ebay |
| 25 mW FPV Video Sender | Amazon | Ebay |
| FPV Kamera 700TVL | Amazon | Ebay |


Wie wird eine Drohne selbst gebaut und welche Bauteile brauche ich dafür? Alle notwendigen Informationen, Anleitungen und Materiallisten findet ihr hier.
Weiterlesen
Auf dieser Seite zeigen wir, wie man einen Hexacopter selber baut. Hier findet man die wichtigsten Tipps, Materiallisten und Installationsanleitungen
Weiterlesen
05.03.2025
25.02.2025
25.02.2025
12.02.2025
AEQ-WEB ist ein Blog von Alex & Andi, der sich mit Elektronik, Funk & Software beschäftigt
WeiterlesenAEQ-WEB © 2015-2025 All Right Reserved