Analoge Spannungen verstärken mit dem LM358
05.03.2025
Elektronik | Funk | Software
Der Technik-Blog


05.03.2025

25.02.2025
25.02.2025

12.02.2025

Bei sehr vielen Schaltungen, wo Mikrocontroller integriert sind, findet man immer wieder die Definition "Pullup" oder Pulldown" Widerstand. Man findet diese Widerstände überwiegend in der Digitaltechnik bei Tastern oder Sensoren. In diesem Artikel gehen wir näher auf die Funktion der Schaltung ein und erläutern wo ein Pull-Up oder ein Pull-Down Widerstand notwendig bzw. sinnvoll ist und wo die unterscheide liegen.
Pull-Up oder Pull-Down Widerstände sind notwendig, dass Sie den Eingang bei einem Mikrocontroller auf einen definierten Wert ziehen. Da sich der Eingang in einem hochohmigen Zustand befindet, kann es vorkommen, dass das "High" oder "Low" am Mikrocontroller schwankt. Als Beispiel könnten bei einigen digitalen Datenübertragungen "Nuller" und "Einser" im Binärsystem falsch eingelesen werden und es käme zu falschen Daten. Außerdem wird der Widerstand bei Tastern benötigt, damit das "High" oder "Low" auch richtig eingelesen wird.
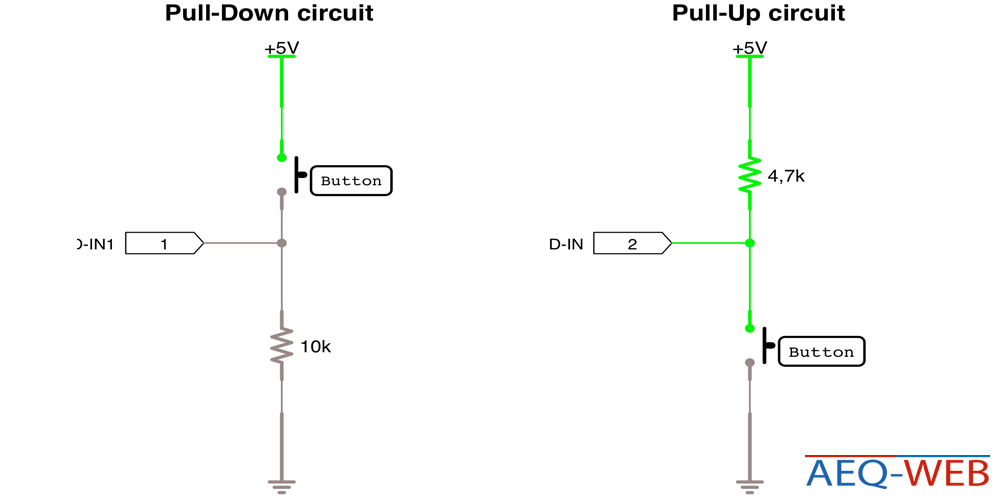
Der Pull-Down Widerstand zieht den Pegel nach unten. Der Eingang vom Mikrocontroller ist ständig gegen Masse geschaltet. Hat man einen Taster, der nicht gedrückt ist, ergibt das am Eingang ein "Low". Drückt man den Taster, so erhält man ein "High". Auch hier verhindert der Widerstand dadurch einen Kurzschluss. Pull-Down Widerstände haben, wenn nicht anderes notwendig in der Regel 10 kOhm.
Der Pull-Up Widerstand zieht den Pegel nach oben. Hat man einen Taster am Mikrocontroller über einen Pull-Up angeschlossen, so liegt am digitalen Pin ein "High" an, wenn der Taster nicht gedrückt wird. Drückt man den Taster, so zieht dieser die Spannung über den Widerstand hinunter und es liegt Masse am I/O Pin an. Der Mikrocontroller erhält dann ein LOW. Der Widerstand verhindert zusätzlich einen Kurzschluss. Für Pull-Up Schaltungen werden Widerstände im Bereich von einigen Hundert Ohm bis hin zu einigen kOhm verwendet, jedoch wird bei Mikrocontrollern meistens 4,7 KOhm als Standardwert verwendet.
Neben den 10K und 4k7 Widerständen, die bei den Mikrocontrollern sehr oft verwendet werden, gibt es aber auch andere Werte. Zum einen hängt es oft davon ab, wie schnell die Schaltung sein muss oder wie hoch der Stromverbrauch, der am Widerstand abfällt, sein darf. Oft haben diese Schaltungen aber nicht nur die Aufgabe, den Pegel zu definieren bzw. zu ziehen, sondern haben eine Dämpfungsfunktion. Dämpfungswiderstände liegen meistens im Bereich zwischen einigen Ohm und unter einem kOhm.
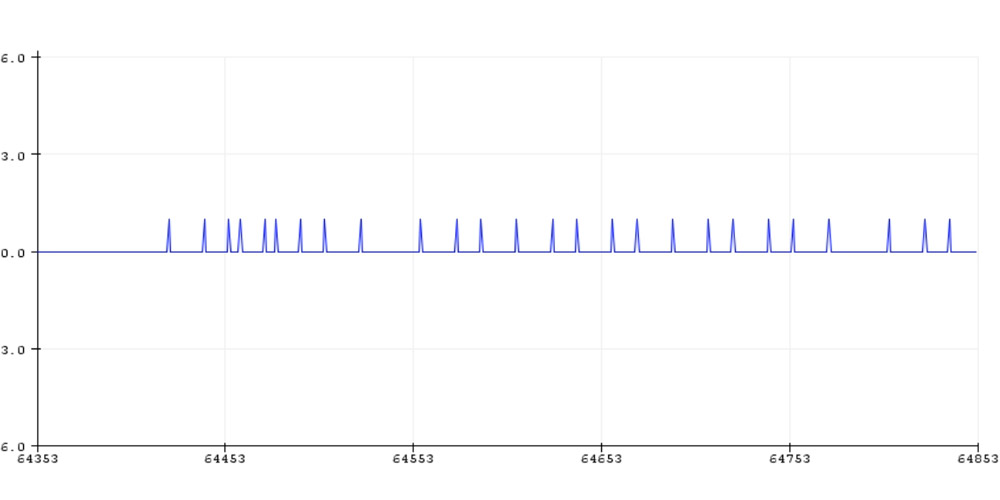
Die obere Grafik zeigt den Status von einem digitalen Eingang auf einem Arduino Uno ohne Pull-Up bzw. Pull-Down Widerstand. Über eine Laufzeit von weniger als 10 Sekunden sieht man, wie oft der Status vom Pin zwischen "High" und "Low" wechselt.

In Teil 1 der Reihe Schaltnetzteile Grundlagen geht es um die Primärseite. Dazu werden wir ein vorhandenes SNT zerlegen und Bauteil für Bauteil analysieren
Weiterlesen
DC Motoren können mit zwei Wechselrelais recht einfach umgepolt werden. Mit diesen Relais kann die Drehrichtung des Gleichstrommotors geändert werden
Weiterlesen
05.03.2025
25.02.2025
25.02.2025
12.02.2025
AEQ-WEB ist ein Blog von Alex & Andi, der sich mit Elektronik, Funk & Software beschäftigt
WeiterlesenAEQ-WEB © 2015-2025 All Right Reserved